
Contenuti dell'articolo

Oggi parleremo di vibrazioni e rumore elettrico, problemi che spesso affliggono i nostri droni.
Ne voglio parlare per varie ragioni… La prima è che si collega bene al mio precedente articolo sui PID (se non l’hai ancora letto lo trovi qui), la seconda è che ho visto diversi di voi avere problemi di vibrazioni nell’ultimo periodo sui social, la terza, è che una mia nuova build ne soffre, e devo cercare di risolverlo!
Vediamo quindi insieme perchè i nostri droni soffrono di vibrazioni e rumore elettrico, e come cercare di risolvere il problema.
Come si manifestano le vibrazioni?
Se il tuo drone è soggetto a rumore elettrico o vibrazioni, sentirai i tuoi motori andare “intermittenza” (chiamato “glitching” in inglese) e noterai una pronunciata, improvvisa e rapida oscillazione del drone, in genere sopra la metà gas. Avrai inoltre una pessima gestione del Propwash.
Puoi vederne un esempio nel video di Joshua Bardwell in fondo all’articolo.
Il giroscopio (gyro)
Il giroscopio, (gyro, da qui in avanti), è il sensore che misura la velocità angolare del drone sui suoi 3 assi.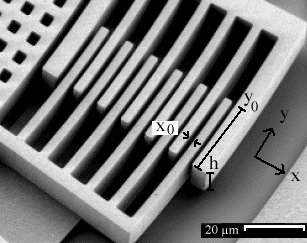
E’ costituito da un integrato MEMS (Micro electronic – mecanic system), che come suggerisce l’acronimo, è formato dall’integrazione di elettronica e meccanica.
In particolare è formato da sottilissime lamelle (millesimi di millimetro) disposte come in figura.
Le lamelle sono collegate in maniera alternata, una al positivo, l’altra al negativo, e quindi formano un condensatore.
Quando il giroscopio è soggetto ad accelerazioni angolari, le lamelle si fletteranno, e quindi alcune si avvicineranno tra loro, mentre altre si allontaneranno.
Questo comporterà una variazione della capacità del condensatore, e un circuito elettronico si occuperà poi di leggere il valore di capacità e di trasformarlo in un numero digitale che rappresenterà la velocità angolare su ogni asse.
(nota, gli attuali mems sono più complessi, ma il principio è questo).
Questo dato digitale sarà infine fornito al flight controller, che lo utilizzerà per calcolare le potenze da dare ai motori al prossimo istante, attraverso i PID.
I tipi di gyro
Sui nostri droni sono comunemente utilizzate 2 tipologie di gyro:
1-“vecchia generazione” MPU6000, MPU6050, …
Il più usato di questa generazione attualmente è il MPU6000.
Ormai utilizzato da anni, collaudato e affidabile, ma con limitazione a 8Khz (8000 letture per secondo).
2- “nuova generazione” ICM20602, ICM20608, ICM20601
Questi sensori sono più recenti dei precedenti, offrono maggiore sensibilità, precisione e possono arrivare a 32Khz (32’000 letture per secondo).
Essendo più sensibili, però saranno anche più soggetti a vibrazioni e rumore, è quindi indispensabile che il flight controller sia progettato bene e che siano usati i soft mount.
Esempio: Un esempio famoso è la prima matek f405-AIO, che a causa di errori di progettazione (tracce della pdb poste sotto al sensore), soffriva di “yaw twitch”, a causa di rumore elettrico. Questo problema ha portato la matek a ritirare la scheda dal mercato. La stessa identica versione, ma senza PDB invece funzionava perfettamente (ne ho una anche io).
Il sensore ICM20601 sembrerebbe essere in particolare il sensore migliore, perchè dovrebbe essere più “resistente” alle vibrazioni. Ha però un costo maggiore, e non l’ho ancora visto montato su molte fc (che io sappia è utilizzato solo dalla “Helio Spring”).
Le vibrazioni ed il rumore elettrico
Le vibrazioni
I motori dei nostri droni ruotano a velocità molto elevate, e per via di sbilanciamenti (della campana, dei dadi, delle eliche) producono vibrazioni. Queste vibrazioni si trasmettono lungo le braccia del drone e talvolta si moltiplicano pure. Infatti se qualche elemento ha una frequenza di vibrazione simile alle frequenze prodotte dai motori, entrerà in risonanza, creando vibrazioni ancora più pronunciate. Le vibrazioni, dopo aver attraversato il frame, arriveranno al giroscopio.
Come abbiamo visto il gyro è composto da sottilissime lamelle che si flettono per misurare la velocità del drone. Risulta allora chiaro, che se il gyro è soggetto a troppe vibrazioni, le lamelle stesse inizieranno a vibrare e il gyro fornirà allora un valore totalmente errato al flight controller!
Il rumore elettrico
Un altro fenomeno che può interferire con la lettura del gyro, è la variazione della tensione di alimentazione del giroscopio stesso. Infatti la misura della capacità, è proporzionale alla tensione di alimentazione. Risulta allora chiaro che se la tensione varia la lettura non sarà più attendibile.
Sfortunatamente i nostri esc sono una fonte di enormi rumori elettrici, che fanno variare in continuazione la tensione di alimentazione (scopriremo nel prossimo articolo sui motori perché gli esc producono rumore elettrico, quindi state aggiornati sui nuovi articoli).
I problemi generati dalle vibrazioni:
1- Il drone vola male
Il primo problema generato dalle vibrazioni, è uno strano comportamento del drone.
Potrai notare noiosi scatti e vibrazioni e motori sembreranno singhiozzare ed andare ad intermittenza (in genere oltre metà gas).
Noterai inoltre una pessima gestione del propwash e il drone risulterà “difficile da pilotare”.
2- I motori si surriscaldano e rischi seriamente di bruciarli
Ma perchè accade questo?
Il PID (come visto nel mio articolo nell’articolo sui PID) corregge i movimenti del drone, per cercare di fargli eseguire ciò che viene richiesto dal radiocomando.
Quando il gyro sarà sottoposto alla vibrazione, il PID cercherà di correggere anche questa, chiedendo ai motori di accelerare e frenare migliaia di volte al secondo.
Come potete immaginare, i motori non sono in grado di accelerare e rallentare così velocemente per via dell’inerzia. L’unico risultato sarà allora il surriscaldamento del motore stesso, con conseguente rischio di bruciatura del motore stesso.
Perchè il PID crea questo comportamento del drone?
Quale parte del PID è la responsabile di questo effetto?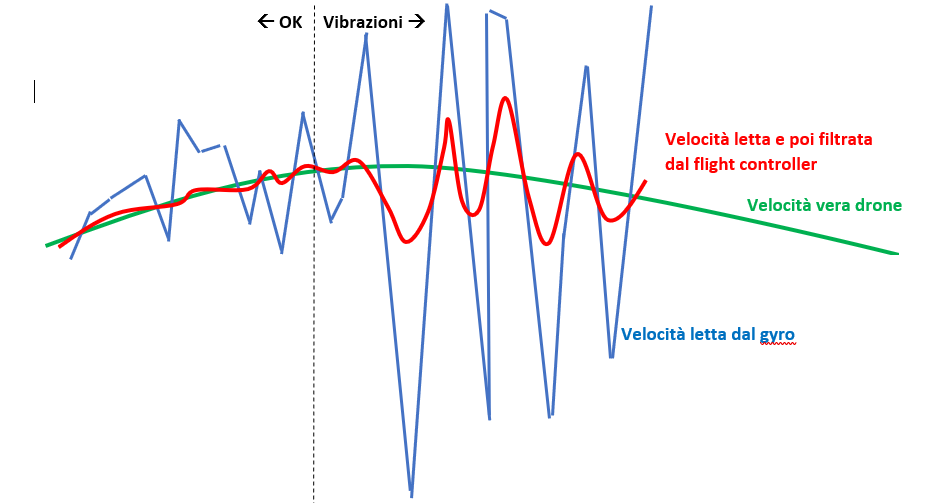
Se hai letto l’articolo sui PID, guardando la figura, lo avrai già capito…
Si tratta del derivativo (D) e in parte del proporzionale (P)!
Il proporzionale è infatti proporzionale all’errore (differenza tra valore letto dal gyro e valore richiesto dal radiocomando), risulta allora chiaro che se il gyro fornisce un valore molto lontano da quello reale, l’azione proporzionale sarà grande!
Il derivativo produrrà un effetto ancora superiore!
Infatti cerca di “prevedere il futuro”, quindi se ad un istante vede il drone che inizia a muoversi in una direzione, lui si opporrà con forza (chiedendo a 2 motori di accelerare e a 2 di frenare), pensando che in futuro il drone continuerà a muoversi in quella direzione.
Ma in realtà quel movimento era solo un errore di lettura del gyro dovuto alle vibrazioni, quindi un istante dopo, il gyro leggerà un valore diverso dal precedente e magari con velocità in senso opposto!
In derivativo, nuovamente si opporrà con forza (chiedendo agli altri 2 motori di accelerare e ai precedenti di frenare).
Queste richieste rapide e opposte tra loto da parte della fc ai motori, finiscono per far surriscaldare i motori, ma non solo…
Visto che i motori in parte accelerano e rallentano in continuazione, il drone inizierà a vibrare e a scuotersi!
Ecco spiegati entrambi i sintomi delle vibrazioni.
NOTA: Nell’articolo sui PID abbiamo detto che un valore maggiore di derivativo tende a far scaldare maggiormente i motori… Ecco scoperto perché!
Nel drone sono sempre presenti infatti un po’ di vibrazioni e rumore e una piccola parte sopravviverà anche al filtraggio, quindi il derivativo andrà a moltiplicarne l’effetto sui motori chiedendogli piccole accelerazioni e decelerazioni in continuazione.
Il filtraggio
Il PID in realtà non utilizza il valore fornito dal gyro, ma un valore già filtrato da un filtro software, che cerca di ridurre i rumori presenti sulla misura.
Se fornissimo al PID il valore non filtrato infatti bruceremmo i motori praticamente all’istante.
E’ possibile vedere anche la fase di filtraggio nell’immagine sopra (linea rossa).
Nella parte di sinistra, in cui è presente solo un minimo rumore, il filtraggio è efficace, mentre dove compaiono le vibrazioni, il filtro non è più sufficiente!
Molti pensano che in caso di vibrazioni sia sufficiente aumentare il filtraggio, ma non è così.
In caso di vibrazioni i valori forniti dal giroscopio sono totalmente sballati, e per filtrarli servirebbe un filtraggio “molto potente”, che di fatto filtrerebbe anche le dinamiche reali del drone, e quindi non si avrebbe più una informazione accurata di come si stia comportando il drone, e quindi il PID non sarebbe più in grado di controllarlo e stabilizzarlo.
Immagini dalla BlackBox
Per far risaltare le vibrazioni nella blackbox, dopo aver aperto il vostro file, premete:
- tasto “Z”, per zoomare completamente indietro.
- tasto “S”, per vedere i valori “non filtrati”
Così facendo, lo “spessore” delle linee (del gyro), ci indicherà il rumore.
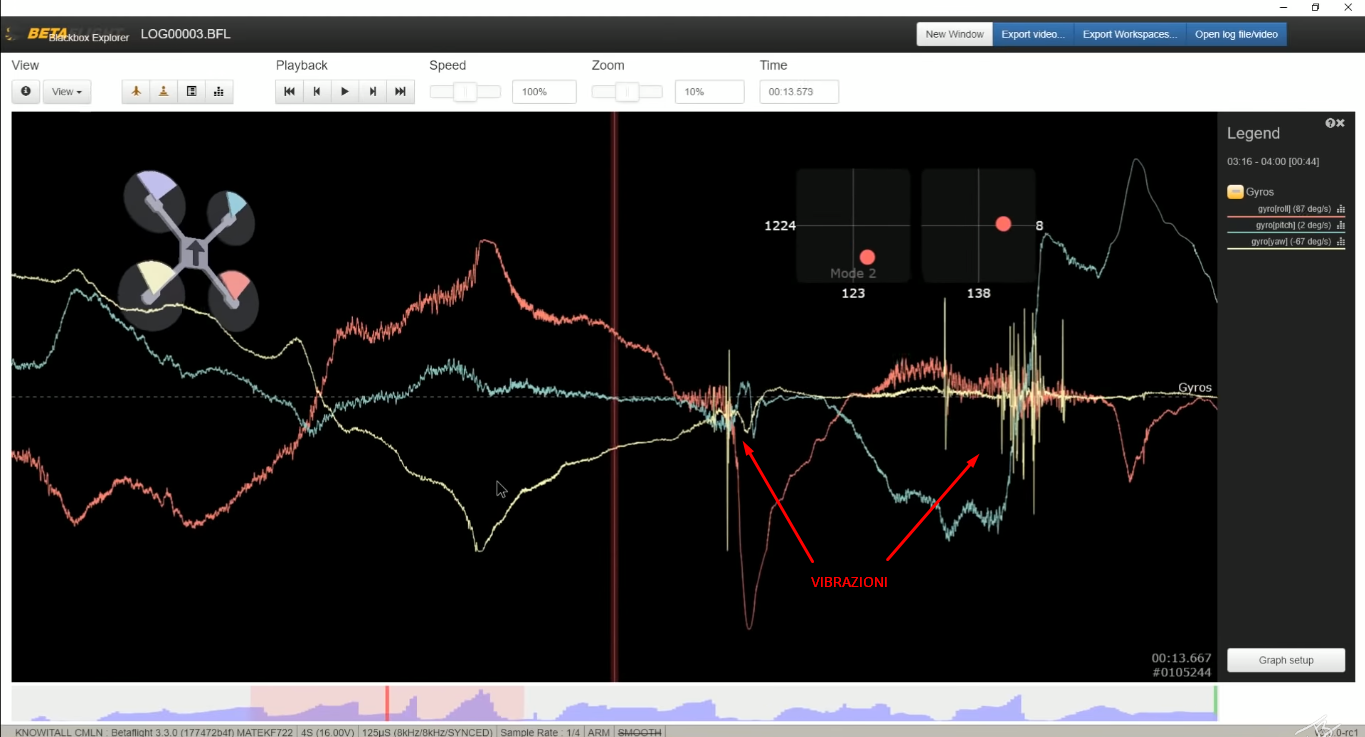
NOTA: per come è costruito il giroscopio, il rumore in genere si vede tanto nell’asse YAW (linea gialla), anche se in realtà le vibrazioni sono maggiori sugli altri assi.
Le soluzioni
Come già detto, non si può fare nulla a livello software, perché il problema è hardware, il gyro fornisce dati totalmente fasulli, e il filtraggio non sarà mai sufficiente…
Bisogna allora procedere per step, sperando di risolvere, anche se in generale non è garantita la soluzione.
A volte purtroppo è difettoso il gyro sulla FC, o magari l’insieme di FC+ESC+motori, non funziona bene insieme. In questi casi, l’unica soluzione è provare a sostituire componenti.
Passi da seguire per provare a risolvere il problema:
1-Provare eliche nuove
Ovviamente eliche sbilanciate creano vibrazioni. Se le tue sono ormai piegate e scheggiate, provane un set nuovo!
Caso tipico è anche quello di bruciare un motore dopo un crash, per aver rotto un’elica, ed aver tentato di “tornare a casa” con un motore che vibrava tanto.
Se in un crash rompi un elica e vedi vibrazioni nel video, il suggerimento è quello di atterrare il prima possibile (in particolare se hai il dynamic filter disattivato)!!
Tenendo il drone in volo rischi infatti di bruciare i motori per via delle vibrazioni (come descritto in precedenza)!
2-Controllare accuratamente il drone
- controllare le vibrazioni dei motori da betaflight, attivandoli uno alla volta senza eliche
- controllare lo stato del carbonio e del frame in generale (in cerca di eventuali crepe)
- controllare che tutte le viti siano serrate
- controllare che non ci siano parti mobili che possano vibrare
- controllare che il gyro sia fissato bene e non a contatto con nulla (nel caso di fc con gyro su soft mount come le kakute)
2-Montare soft mount alla FC
Cerchiamo di isolare per quanto possibile la fc, così che non venga investita dalle vibrazioni per cercare di risolvere il problema.
Questo può essere ottenuto grazie a comodi “standoff” in gomma.
3-Montare un Condensatore
Se con il soft mount provi a ridurre le vibrazioni, con un condensatore, provi ad ridurre i rumori elettrici.
Aggiungere un condensatore, infatti è come aggiungere un serbatoio in un tubo di acqua.
Aiuta a smorzare le variazioni di pressione.
Assicurati però che il condensatore sia di buona qualità e low esr (quindi con bassa resistenza).
I valori consigliati sono 330uF su ogni esc se hai esc singoli, o un unico 470uF o 1000uF sul cavo della batteria se hai un esc 4in1.
Per quanto riguarda i valori della tensione del condensatore, in genere si utlizzano condensatori da 25V su droni alimentati con batterie 4s, e 35V su droni alimentati con batteria 6s.
Condensatori consigliati:
3-Sostituire componenti
- Provare a sostituire il frame (solo se si sospetta essere di carbonio di bassa qualità/molto flessibile)
- Provare una una nuova FC (di diverso modello), magari il gyro è difettoso, o per come è disegnata la FC, risulta essere molto soggetta a vibrazioni e rumore elettrico
- provare a sostituire i motori
- provare a sostituire esc
Il video di Joshua Bardwell
Se parli un po’ di inglese, guarda il video di Joshua Bardwell in cui parla di questo argomento! Ti aiuterà a capire meglio l’argomento!
Articolo di Devis Palmi
